This store ships orders in less than 48 hours, in more than 80% of
cases (excluding weekends).



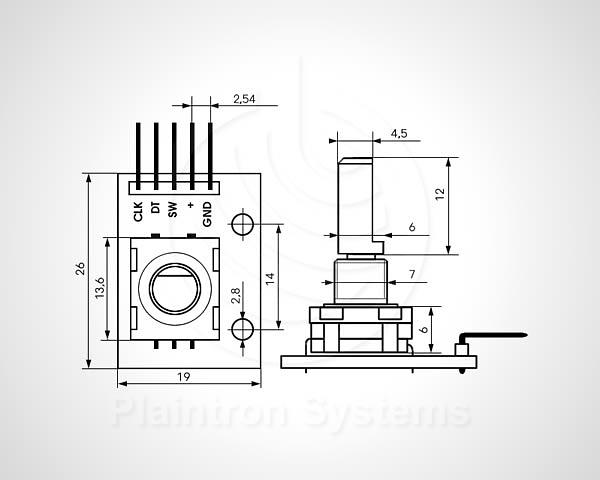

Drehgeber-Modul (Rotary Encoder) KY-040 Achse 6x12mm 20 Pos. f. Arduino, Raspi, Breadboard etc.
Drehgeber auf Platine mit 5-poliger Stiftleiste im Raster 2,54mm für Experimentierboard und Mikrocontroller-Projekte
Dieser Encoder mit 20 Positionen arbeitet nach dem Quadratur-Prinzip und ist bereits fertig montiert und mit Pullup-Widerständen (10k) für die Encoder-Pins versehen. Der Tastkontakt, der beim Druck auf den Encoder schließt, ist für einen Widerstand vorbereitet, aber nicht bestückt. Dadurch lässt sich der Taster gegen Betriebsspannung oder gegen Masse schalten.
Durch die aufgelötete Stiftleiste lässt sich dieser Drehgeber leicht auf dem Breadboard einsetzen oder durch entsprechende Steckerleisten kontaktieren. Die Platine verfügt über zwei durchkontaktierte Bohrungen für eine einfache Befestigung in Gehäusen oder an Frontplatten. Die abgeflachte Metall-Drehachse hat einen Durchmesser von 6 mm bei einer Länge von 12 mm.
Durch die Quadratur-Schaltsequenz ist es möglich, diesen Encoder ohne aufwändige Entprell-Maßnahmen (debouncing) zu betreiben. Da nacheinander vier verschiedene Schaltzustände (00, 01 durchlaufen werden, kann der jeweils aktuelle Zustand in einer Variablen gespeichert und nach einer Drehung mit dem neuen Zustand verglichen werden. Dazu wird üblicherweise eine Lookup-Table mit allen vier Positionen angelegt. Wird durch den Encoder ein Interrupt ausgelöst, lässt sich errechnen, ob der aktuelle Zustand vor oder nach dem vorherigen Wert in der Tabelle abgelegt ist, wodurch eine eindeutige Erkennung der Drehrichtung möglich ist.
Eine genaue Anleitung mit Beispielcode finden Sie z.B. unter dem Suchbegriff "Rotary encoders, done properly" im Buxtronic-Blog oder bei Makeatronics im Beitrag "Efficiently Reading Quadrature With Interrupts". Weiterhin sind passende Libraries für Arduino, Teensy & Co. verfügbar, mit denen auch mehrere dieser Encoder gleichzeitig abgefragt werden können.
Lieferumfang: Drehgeber-Modul mit Stiftleistenanschluss
Versand: Deutsche-Post-Großbrief
- Typ: Quadratur-Drehgeber, 20 Positionen
- Art.-Nr.: ROT KY040 S
- Achse: 6mm, abgeflacht, 12 mm lang
- Maße Platine: 26 mm x 19 mm
- Befestigung: Zentralgewinde 7 mm, 2 Bohrungen 2,8 mm
- Anschlüsse: 2x Encoder, 1x Taster, Betriebsspannung, Masse
Links to code and documentation
No additional links provided for this product.
Shipping policy
Versand in Deutschland
